| Linux活用レシピ > ドローンに活用 > ドローンをRaspberryPiとGoで自動飛行させカメラ動画を撮影し録画する方法 | |
|
|
このページでは、ドローン「TELLO」をRaspberry PiとGoで自動飛行させカメラ動画を撮影し録画する方法を紹介します。 |
|
はじめに └ 説明 準備 ├ ドローン ├ RaspberryPi ├ Go言語 └ 動画表示録画 自動飛行PG ├ 自動飛行開始 ├ カメラ動画撮影 └ カメラ動画録画 KEY操縦PG ├ KEY操縦撮影 └ KEY操縦録画 製品 このレシピで利用した「日本語版 Rapbian (LibreOffice付) インストール済SDカード」\1800 は以下の販売チャネルで。 |
◆ドローンをキーボードで操作し撮影(録画)する方法◆ |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 これまで作ったコードを利用し、自動飛行の部分をキーボードから入力されたキーを判定し、Telloの動きを制御しながらカメラの映像を録画する内容に書き換えたものを紹介します。
これまで作ったコードを利用し、自動飛行の部分をキーボードから入力されたキーを判定し、Telloの動きを制御しながらカメラの映像を録画する内容に書き換えたものを紹介します。まず、Raspbianのメニューから赤枠の部分をクリックしてターミナルを起動します。
カレントディレクトリに「tello_keybord_play.go」をviで作成します。
| |||
|
動画はカレントディレクトリの「drone.mp4」に上書き保存(厳密にはdrone.mp4ファイルがあれば削除してから「drone.mp4」ファイルを作成し記録)しますので、前回のフライト動画が残っている場合は、以下のコマンドでバックアップしておくなど注意してください。
準備が出来れば「tello_keybord_rec.go」を実行します。
「tello_keybord_rec.go」の操縦は以下のとおり行います。
「ESC」が押されるとその場で静止しますので、またキーを入力して、次の動作に移らせてください。 なので、例えば「D」を押した後、「U」を押すと時計回りに旋回をしながら上昇していくという動作になります。 なお、GoのTelloへの命令セットはよくわかっていないので、「→」右に平行移動後に「←」を入力するとカウンターがあたりその場で静止するイメージですが、そうではなさそう(動作が不安定)なので、次の動作に移る場合は「ESC」キーを入力(全方位に(0)を展開し静止)した後に、入力すると安定して動作するようです。 |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
Telloの操縦を終了する場合は、「L」を入力して着陸させます。
以上で操縦は終了です。
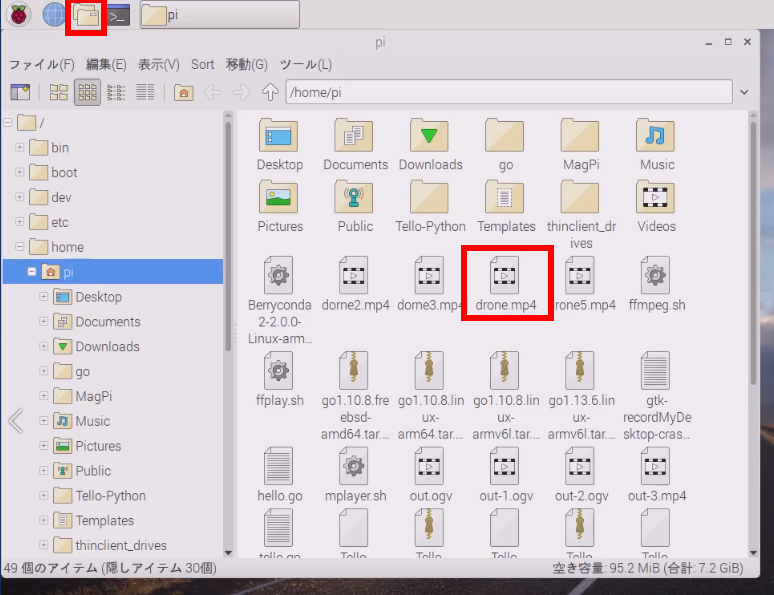
なお、フライト動画はカレントディレクトリに「drone.mp4」で保存されていますので、以下の通りファイルマネージャで表示させて、ダブルクリックして閲覧しましょう。 |
|||||||